RC-Integrierer Rechner
Berechnung von RC-Integriergliedern: Widerstand, Kapazität, Zeitkonstante und Signalglättung
RC-Integrierer verstehen
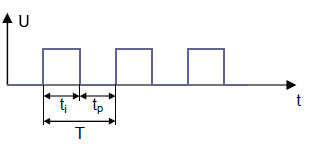
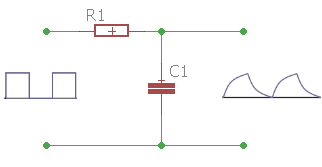
Ein RC-Integrierer ist ein Signalglätter, der aus Rechteckspannungen am Eingang geglättete, dreieckige oder exponentielle Signale am Ausgang erzeugt. Er besteht aus einem Widerstand R in Serie mit dem Eingang und einem Kondensator C parallel zum Ausgang. Die Zeitkonstante τ = RC bestimmt den Grad der Signalglättung.
⏰ Zeitkonstante τ
Bestimmt die Signalglättung:
📊 Integrations-Kriterium
Für gute Integration:
⚡ Dimensionierung
Für t₁ = τ/5 (gute Integration):
🎯 Starke Glättung
Für t₁ ≪ τ/10 (sehr starke Glättung):
Grundformeln des RC-Integrierers
📊 Zeitkonstante und Dimensionierung
Die fundamentalen Beziehungen für den RC-Integrierer:
\[τ = R \cdot C\] \[R = \frac{τ}{C} = \frac{nt_1}{C}\] \[C = \frac{τ}{R} = \frac{nt_1}{R}\]
Wobei: n = 5 für gute Integration, n = 10 für sehr starke Glättung
🔧 Ausgangsspannung
Die Ausgangsspannung für verschiedene Eingangssignal-Formen:
\[u_{aus}(t) = \frac{1}{RC} \int u_{ein} \, dt\] \[\text{Für Rechteckimpuls: } u_{aus} = U_0 \left(1 - e^{-t/τ}\right)\]
Bei konstantem Eingang: Exponentieller Anstieg zur Eingangsspannung
Praktische Beispiele
📝 Beispiel 1: Dreiecksignal-Generator
Aufgabe: 1 kHz Rechtecksignal in Dreiecksignal umwandeln
Gegeben: t₁ = 0,5 ms, Verhältnis t₁/τ = 1/5, gesucht: R und C
Berechnung:
\[τ = 5 \cdot t_1 = 5 \cdot 0,5 \text{ ms} = 2,5 \text{ ms}\] \[\text{Wähle } C = 470 \text{ nF} \Rightarrow R = \frac{τ}{C} = \frac{2,5 \times 10^{-3}}{470 \times 10^{-9}} = 5,3 \text{ kΩ}\]
Ergebnis: R = 5,3 kΩ, C = 470 nF erzeugt lineares Dreiecksignal.
📝 Beispiel 2: Glättungsfilter für PWM
Aufgabe: PWM-Signal (10 kHz) in Gleichspannung glätten
Gegeben: t₁ = 50 μs, sehr starke Glättung gewünscht (t₁/τ = 1/20)
Berechnung:
\[τ = 20 \cdot t_1 = 20 \cdot 50 \text{ μs} = 1 \text{ ms}\] \[\text{Wähle } R = 1 \text{ kΩ} \Rightarrow C = \frac{τ}{R} = \frac{1 \times 10^{-3}}{1 \times 10^3} = 1 \text{ μF}\]
Ergebnis: R = 1 kΩ, C = 1 μF erzeugt sehr geglättete DC-Spannung.
Schaltbild und Signalverläufe
📈 Signalverhalten t₁ = τ/5
- • Rechteckeingang: Dreiecksausgang
- • Anstieg: Linear proportional
- • Amplitude: ≈ 20% der Eingangsspannung
- • Form: Nahezu perfekte Dreiecke
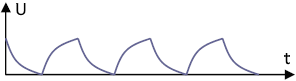
📐 Signalverhalten t₁ ≪ τ/10
- • Rechteckeingang: Exponentieller Ausgang
- • Anstieg: Exponentiell gesättigend
- • Amplitude: ≈ 95% der Eingangsspannung
- • Form: Starke Glättung/Tiefpassverhalten
Praktische Anwendungen
🔄 Signalverarbeitung
- • Dreiecksignal-Generierung
- • PWM-zu-Analog-Wandlung
- • Signalglättung
- • Mittelwertbildung
📡 Elektronik
- • Tiefpassfilter
- • Glättungskondensatoren
- • Verzögerungsschaltungen
- • Frequenzgangformung
💡 Praktische Tipps:
- Dimensionierung: τ sollte 5-20x größer als die Impulsdauer sein
- Kondensator-Wahl: Niedrige ESR für saubere Integration (Tantal, Keramik)
- Lastimpedanz: Nachfolgeschaltung sollte hochohmig sein (≥10×R)
- Offsetfehler: Bei langen Integrationszeiten auf Leckströme achten
Grundlagen
Leitungswiderstand
kVA aus Ampere und Volt
Dezibel in linearen Faktor umrechnen
Dezibel, Spannung, Leistung umrechnen
Ohmsche Gesetz
Coulombsche Gesetz
Batterie Kapazität
Elektrizitätsmenge
Elektrische Energie
Elektrische Leistung
Elektrische Ladung
Innenwiderstand einer Stromquelle
Kondensator Kapazität
Spannungverlust auf einer Leitung
Tabelle der Temperaturkoeffizienten
Temperaturabhängigkeit vom Widerstand
Schaltungen mit Widerständen
PI-Dämpfungsglied
T-Dämpfungsglied
2 Parallelwiderstände
Mehrere Parallelwiderstände
Serienwiderstände
unbelasteter Spannungsteiler
belasteter Spannungsteiler
Vorwiderstand (Voltmeter)
Parallelwiderstand (Ampermeter)
Schaltungen mit Kondensatoren
Mehrere Kondensatoren Reihenschaltung
Zwei Kondensatoren Reihenschaltung
Blindwiderstand XC eines Kondensators
Zeitkonstante eines R/C-Glieds
Ladespannung zu einem Zeitpunkt
Kondensatorspannung zu einem Zeitpunkt
R oder C zu einer Ladespannung
RC Reihenschaltung
RC Parallelschaltung
RC Hochpass
RC Tiefpass
RC Differenzierer
RC Integrierierer
RC Grenzfrequenz berechnen
R + C bei gegebener Impedanz
Schaltungen mit Spulen
Induktivität einer Spule
Blindwiderstand einer Spule
L/R Reihenschaltung
L/R Parallelschaltung
L/R Hochpass
L/R Tiefpass
L/R Grenzfrequenz
L/R Differenzierglied
Transformator
Kondensatoren und Spulen
Resonanzfrequenz
Serienschwingkreis
Parallelschwingkreis
Parallelschaltung
Serienschaltung
Gleichrichter- und Dioden
Einweg Gleichrichtung
Einweg Gleichrichtung mit Ladekondensator
Zweiweg Gleichrichtung
Zweiweg Gleichrichtung mit Ladekondensator
LED Vorwiderstand
Vorwiderstand zur Zenerdiode mit variabler Last
Vorwiderstand zur Zenerdiode