LR-Tiefpass Rechner
Berechnung von LR-Tiefpassfiltern: Ausgangsspannung, Dämpfung, Phasenverschiebung und Grenzfrequenz
Geben Sie die Werte für Widerstand R, Induktivität L, Frequenz f und Eingangsspannung U ein und klicken Sie auf Berechnen um die Tiefpass-Eigenschaften zu ermitteln.
LR-Tiefpass verstehen
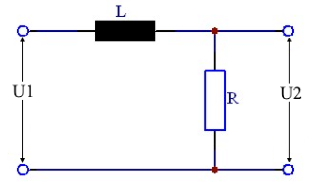
Ein LR-Tiefpass ist ein induktiver Filter, der niedrige Frequenzen durchlässt und hohe Frequenzen dämpft. Er besteht aus einer Induktivität L in Serie und einem Widerstand R parallel zum Ausgang. Die Grenzfrequenz fg = R/(2πL) bestimmt das Filterverhalten.
📉 Tiefpass-Verhalten
Übertragungsverhalten:
📉 Ausgangsspannung
Spannungsteiler-Prinzip:
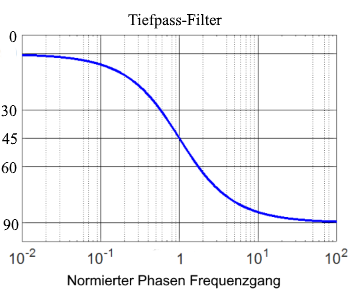
🔄 Phasenverhalten
Phasenverschiebung:
📊 Grenzfrequenz
-3dB-Punkt:
Grundformeln des LR-Tiefpasses
📊 Übertragungsverhalten
Die fundamentalen Formeln für LR-Tiefpassfilter:
\[U_2 = U_1 \cdot \frac{R}{\sqrt{R^2 + (2πfL)^2}}\] \[V_u = 20 \cdot \log_{10}\left(\frac{U_2}{U_1}\right) \text{ [dB]}\] \[φ = -\arctan\left(\frac{ωL}{R}\right) \text{ [°]}\]
Dabei ist: ω = 2πf, XL = ωL
🔧 Grenzfrequenz und Dimensionierung
Auslegung von LR-Tiefpassfiltern:
\[f_g = \frac{R}{2πL}\] \[R = 2πf_g L\] \[L = \frac{R}{2πf_g}\]
Bei fg: |H| = 1/√2 ≈ 0,707 (-3dB), φ = -45°
Praktische Beispiele
📝 Beispiel 1: Netzdrossel für Motoren
Aufgabe: Netzdrossel für Motoranlauf-Strombegrenzung bei 50 Hz
Gegeben: fg = 150 Hz, Motorwiderstand R = 2 Ω
Berechnung:
\[L = \frac{R}{2πf_g} = \frac{2}{2π \cdot 150} = 2,12 \text{ mH}\] \[\text{Bei 50 Hz: } X_L = 2π \cdot 50 \cdot 2,12 \times 10^{-3} = 0,67 \text{ Ω}\]
Ergebnis: L = 2,12 mH reduziert Einschaltstrom bei 50 Hz auf 75% des Nennwerts.
📝 Beispiel 2: EMV-Filter für Schaltnetzteil
Aufgabe: Common-Mode-Drossel für 100 kHz Schaltfrequenz
Gegeben: fg = 10 kHz, Leitungsimpedanz R = 50 Ω
Berechnung:
\[L = \frac{50}{2π \cdot 10000} = 796 \text{ μH}\] \[\text{Bei 100 kHz: } X_L = 2π \cdot 100000 \cdot 796 \times 10^{-6} = 500 \text{ Ω}\]
Ergebnis: L = 796 μH (820 μH E12) dämpft 100 kHz um -20dB.
Frequenzgang und Phasenverhalten
📉 Amplitudengang
- • f ≪ fg: Keine Dämpfung (0dB)
- • f = fg: -3dB Dämpfung
- • f ≫ fg: Starke Dämpfung (-20dB/Dekade)
- • Rolloff: -20dB/Dekade über fg
🔄 Phasengang
- • f ≪ fg: φ ≈ 0° (resistiv)
- • f = fg: φ = -45°
- • f ≫ fg: φ ≈ -90° (induktiv)
- • Übergang: Kontinuierlich von 0° zu -90°
Praktische Anwendungen
🏭 Leistungstechnik
- • Motordrosseln und Sanftanlauf
- • Netzdrosseln für Frequenzumrichter
- • Stromregelung in Schweißgeräten
- • Beleuchtung-Vorschaltgeräte
📡 EMV und Filterung
- • Common-Mode-Drosseln
- • Netzfilter für Schaltnetzteile
- • HF-Entstörung in Industrieanlagen
- • Differential-Mode-Filterung
💡 Praktische Tipps:
- Kernmaterial: Eisenpulver für hohe Ströme, Ferrit für EMV-Filter
- Stromsättigung: Induktivität fällt bei Kernsättigung stark ab
- Verluste: DCR und Kernverluste bei hohen Strömen beachten
- Hochfrequenz: LR-Tiefpass ideal für EMV-Anwendungen
Grundlagen
Leitungswiderstand
kVA aus Ampere und Volt
Dezibel in linearen Faktor umrechnen
Dezibel, Spannung, Leistung umrechnen
Ohmsche Gesetz
Coulombsche Gesetz
Batterie Kapazität
Elektrizitätsmenge
Elektrische Energie
Elektrische Leistung
Elektrische Ladung
Innenwiderstand einer Stromquelle
Kondensator Kapazität
Spannungverlust auf einer Leitung
Tabelle der Temperaturkoeffizienten
Temperaturabhängigkeit vom Widerstand
Schaltungen mit Widerständen
PI-Dämpfungsglied
T-Dämpfungsglied
2 Parallelwiderstände
Mehrere Parallelwiderstände
Serienwiderstände
unbelasteter Spannungsteiler
belasteter Spannungsteiler
Vorwiderstand (Voltmeter)
Parallelwiderstand (Ampermeter)
Schaltungen mit Kondensatoren
Mehrere Kondensatoren Reihenschaltung
Zwei Kondensatoren Reihenschaltung
Blindwiderstand XC eines Kondensators
Zeitkonstante eines R/C-Glieds
Ladespannung zu einem Zeitpunkt
Kondensatorspannung zu einem Zeitpunkt
R oder C zu einer Ladespannung
RC Reihenschaltung
RC Parallelschaltung
RC Hochpass
RC Tiefpass
RC Differenzierer
RC Integrierierer
RC Grenzfrequenz berechnen
R + C bei gegebener Impedanz
Schaltungen mit Spulen
Induktivität einer Spule
Blindwiderstand einer Spule
L/R Reihenschaltung
L/R Parallelschaltung
L/R Hochpass
L/R Tiefpass
L/R Grenzfrequenz
L/R Differenzierglied
Transformator
Kondensatoren und Spulen
Resonanzfrequenz
Serienschwingkreis
Parallelschwingkreis
Parallelschaltung
Serienschaltung
Gleichrichter- und Dioden
Einweg Gleichrichtung
Einweg Gleichrichtung mit Ladekondensator
Zweiweg Gleichrichtung
Zweiweg Gleichrichtung mit Ladekondensator
LED Vorwiderstand
Vorwiderstand zur Zenerdiode mit variabler Last
Vorwiderstand zur Zenerdiode