LR-Reihenschaltung Rechner
Berechnung von LR-Reihenschaltungen: Impedanz, Spannungen, Strom, Leistung und Phasenwinkel
Geben Sie die Werte für Induktivität L, Widerstand R, Frequenz f und Spannung U ein und klicken Sie auf Berechnen um die LR-Reihenschaltung zu analysieren.
LR-Reihenschaltung verstehen
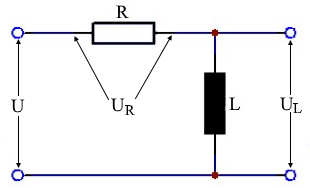
In einer LR-Reihenschaltung sind Widerstand R und Induktivität L hintereinander geschaltet. Der Strom ist überall gleich, während sich die Spannungen vektoriell addieren. Die Impedanz Z = √(R² + XL²) bestimmt den Gesamtwiderstand der Schaltung.
🔗 Reihenschaltung-Prinzip
Grundlegende Eigenschaften:
⚡ Impedanz-Berechnung
Gesamtwiderstand:
🔄 Phasenbeziehungen
Phasenverschiebung:
📊 Leistungsbeziehungen
Leistungsdreieck:
Grundformeln der LR-Reihenschaltung
📊 Spannungsdreieck
Vektorielle Addition der Teilspannungen:
\[U = \sqrt{U_R^2 + U_L^2}\] \[U_R = U \cdot \cos(φ) = I \cdot R\] \[U_L = U \cdot \sin(φ) = I \cdot X_L\] \[φ = \arctan\left(\frac{U_L}{U_R}\right)\]
🔧 Widerstandsdreieck
Impedanz-Berechnung und Komponenten:
\[Z = \sqrt{R^2 + X_L^2} = \frac{U}{I}\] \[R = Z \cdot \cos(φ) = \frac{U_R}{I}\] \[X_L = Z \cdot \sin(φ) = \frac{U_L}{I} = 2πfL\] \[φ = \arctan\left(\frac{X_L}{R}\right)\]
⚡ Leistungsdreieck
Wirk-, Blind- und Scheinleistung:
\[S = \sqrt{P^2 + Q^2} = U \cdot I\] \[P = S \cdot \cos(φ) = U_R \cdot I = I^2 \cdot R\] \[Q = S \cdot \sin(φ) = U_L \cdot I = I^2 \cdot X_L\] \[\cos(φ) = \frac{P}{S} = \frac{R}{Z}\]
Praktische Beispiele
📝 Beispiel 1: Motor mit Anlaufdrossel
Aufgabe: 3-Phasen-Motor mit Netzdrossel
Gegeben: L = 5 mH, R = 0,5 Ω, f = 50 Hz, U = 400 V
Berechnung:
\[X_L = 2π \cdot 50 \cdot 5 \times 10^{-3} = 1,57 \text{ Ω}\] \[Z = \sqrt{0,5^2 + 1,57^2} = 1,65 \text{ Ω}\] \[I = \frac{400}{1,65} = 242 \text{ A}\] \[φ = \arctan\left(\frac{1,57}{0,5}\right) = 72,3°\]
Ergebnis: Netzdrossel begrenzt Anlaufstrom auf 242 A bei 72,3° Phasenverschiebung.
📝 Beispiel 2: Audio-Frequenzweiche
Aufgabe: LR-Filter für Mitteltöner-Lautsprecher
Gegeben: L = 1 mH, R = 8 Ω, f = 1 kHz, U = 10 V
Berechnung:
\[X_L = 2π \cdot 1000 \cdot 1 \times 10^{-3} = 6,28 \text{ Ω}\] \[Z = \sqrt{8^2 + 6,28^2} = 10,2 \text{ Ω}\] \[I = \frac{10}{10,2} = 0,98 \text{ A}\] \[U_R = 0,98 \cdot 8 = 7,84 \text{ V}\]
Ergebnis: Am Lautsprecher (R) liegen 7,84 V bei 1 kHz an (-2,1 dB Dämpfung).
Eigenschaften und Verhalten
📈 Frequenzverhalten
- • DC (f=0): Z = R, φ = 0°
- • Niedrige f: Resistives Verhalten
- • Hohe f: Induktives Verhalten
- • f → ∞: Z ≈ XL, φ → 90°
🔄 Phasenbeziehungen
- • UR: In Phase mit Strom
- • UL: +90° vor Strom
- • Uges: +φ vor Strom
- • Leistung: Nur R verbraucht Wirkleistung
Praktische Anwendungen
🏭 Energietechnik
- • Motordrosseln für Anlaufstrombegrenzung
- • Transformatoren (Primärseite)
- • Leistungsfaktor-Korrektur
- • Schweißgeräte und Stromquellen
🎵 Audio und Signaltechnik
- • Lautsprecher-Frequenzweichen
- • Audio-Filter und Equalizer
- • Impedanzanpassung
- • Verstärker-Eingangsschaltungen
💡 Praktische Tipps:
- Dimensionierung: Bei kleinem R dominiert XL, bei großem R dominiert R
- Resonanz: Zusammen mit Kapazität entstehen Schwingkreise
- Verluste: DCR der Spule zu R addieren für genaue Berechnung
- Grenzfrequenz: fg = R/(2πL) für -3dB-Punkt
Grundlagen
Leitungswiderstand
kVA aus Ampere und Volt
Dezibel in linearen Faktor umrechnen
Dezibel, Spannung, Leistung umrechnen
Ohmsche Gesetz
Coulombsche Gesetz
Batterie Kapazität
Elektrizitätsmenge
Elektrische Energie
Elektrische Leistung
Elektrische Ladung
Innenwiderstand einer Stromquelle
Kondensator Kapazität
Spannungverlust auf einer Leitung
Tabelle der Temperaturkoeffizienten
Temperaturabhängigkeit vom Widerstand
Schaltungen mit Widerständen
PI-Dämpfungsglied
T-Dämpfungsglied
2 Parallelwiderstände
Mehrere Parallelwiderstände
Serienwiderstände
unbelasteter Spannungsteiler
belasteter Spannungsteiler
Vorwiderstand (Voltmeter)
Parallelwiderstand (Ampermeter)
Schaltungen mit Kondensatoren
Mehrere Kondensatoren Reihenschaltung
Zwei Kondensatoren Reihenschaltung
Blindwiderstand XC eines Kondensators
Zeitkonstante eines R/C-Glieds
Ladespannung zu einem Zeitpunkt
Kondensatorspannung zu einem Zeitpunkt
R oder C zu einer Ladespannung
RC Reihenschaltung
RC Parallelschaltung
RC Hochpass
RC Tiefpass
RC Differenzierer
RC Integrierierer
RC Grenzfrequenz berechnen
R + C bei gegebener Impedanz
Schaltungen mit Spulen
Induktivität einer Spule
Blindwiderstand einer Spule
L/R Reihenschaltung
L/R Parallelschaltung
L/R Hochpass
L/R Tiefpass
L/R Grenzfrequenz
L/R Differenzierglied
Transformator
Kondensatoren und Spulen
Resonanzfrequenz
Serienschwingkreis
Parallelschwingkreis
Parallelschaltung
Serienschaltung
Gleichrichter- und Dioden
Einweg Gleichrichtung
Einweg Gleichrichtung mit Ladekondensator
Zweiweg Gleichrichtung
Zweiweg Gleichrichtung mit Ladekondensator
LED Vorwiderstand
Vorwiderstand zur Zenerdiode mit variabler Last
Vorwiderstand zur Zenerdiode